 اخبار فناوری دیارمنواز اخبار فناوری ایران و جهان
اخبار فناوری دیارمنواز اخبار فناوری ایران و جهان
شناسایی اعماق آب؛ آرزویی با قدمت چند هزار ساله!
سالیان متمادی است که بشر تمام تلاش و امکانات موجود را به کار گرفته است تا بتواند بر فضای تاریک و پر مخاطره اعماق دریاها غلبه نماید. شاید برایتان جالب باشد بدانید آنچه که مانع از موفقیت انسان در این زمینه شده است، قدرت بینایی چشم غیر مسلح وی می باشد. لازم به ذکر است که قدرت بینایی چشم غیر مسلح در آب های آزادی که کاملا شفاف هستند، کمتر از سه متر است. این در حالی است که این قدرت در آب های غیر شفاف به کمتر از نیم متر می رسد! ناتوانی های انسان در این زمینه سبب شد تا وی به فکر جبران این نقص برآمده و با به کارگیری سایر فاکتورهای موجود به اعماق دریاها نفوذ نموده و به شناسایی مشخصات محیطی آب دریا، مخازن یا چاه ها بپردازد. نتیجه این تلاش ها دستگاهی شد به نام عمق یاب!

حال که انسان از به کارگیری قوه بینایی خود در زمینه شناسایی اعماق آب ها نا امید شده بود، صوت می توانست بهترین گزینه برای جایگزینی باشد. بر اساس نتایج تحقیقات انجام شده در این زمینه صوت علیرغم تمام موانعی که بر سر راه انتشار خود دارد، قادر است به طور قابل توجهی در آب نفوذ نماید. همین امر موجب شکل گیری تئوری عمق یابی توسط صوت شد. حال شاید این سوال ذهنتان را به خود درگیر کرده باشد که تئوری مذکور از چه قرار است؟
- تئوری عمق یابی توسط صوت
جالب است بدانید که بر اساس این تئوری، بسته های سیگنال های صوتی تک فرکانسه که غالبا از نوع اولتراسونیک هستند، پس از تولید در دستگاه مذکور، تقویت شده و سپس به وسیله ترانسدیوسر مخصوصی که هیدروفون نام دارد، در محیط آب دریا، مخازن یا چاه ها انتشار پیدا می کنند. گفتنی است که سیگنال های مذکور پس از برخورد با مانع و انعکاس صوت، به گیرنده های دستگاه عمق یاب می رسند.
گیرنده های موجود در ساختار دستگاه نام برده پس از دریافت سیگنال های فوق الذکر، به تقویت آن ها پرداخته و در گام بعدی سیگنال های مزاحم را از سیگنال های اصلی جدا می کنند. این گیرنده ها سپس سیگنال های اصلی را در اختیار پردازنده قرار می دهند تا عملیات پردازش را بر روی آن ها انجام دهد.
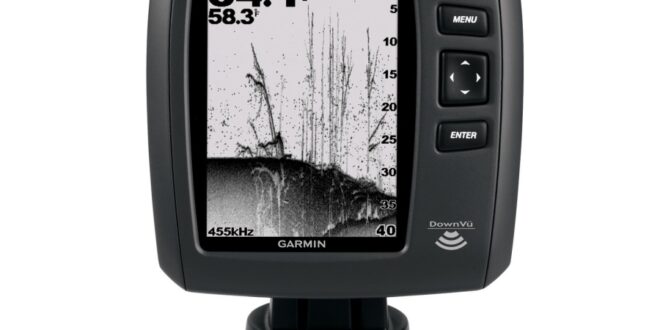
لازم به ذکر است که در عملیات پردازش، علاوه بر محاسبه اختلاف زمان ارسال بسته مشخص سیگنال و دریافت بسته های برگشتی، فاصله موجود میان عمق یاب تا هدف محاسبه شده و بر روی صفحه نمایشی که در ساختار این دستگاه تعبیه شده است، نمایش داده می شود.
- معرفی اجزای اصلی یک عمق یاب
گفتنی است که یک عمق یاب در ساختار خود از یک سری اجزای اصلی برخوردار می باشد. از جمله مهم ترین این اجزا می توان به مولد سیگنال فرستنده، مبدل سیگنال الکتریکی یا به عبارت دیگر ترانسدیوسر، گیرنده امواج، مدارات آشکارسازی و آنالیز به منظور نمایش و… اشاره نمود.
- مولد سیگنال فرستنده
در این بخش به تناسب ماموریتی که عمق یاب برای آن گمارده شده و نیز متناسب با نوع ترانسدیوس، فرکانس F5 تولید و به وسیله مولد پالس به صورت زمانی کنترل می شود تا بدین ترتیب در فواصل منظمی اقدام به تولید Burst نماید.
لازم به ذکر است که انتخاب فرکانس تابع شرایط محیط، ترانسدیوس و مواردی از این قبیل می باشد.
- مبدل سیگنال الکتریکی (ترانسدیوسر)
لازم است بدانید که ترانسدیوسرها در انواع متعدد و متنوعی موجود می باشند که در ادامه به معرفی مختصر برخی از آن ها خواهیم پرداخت.
- سیم پیچ متحرک
این دسته از ترانسدیوسرها غالبا در گوشی های معمولی مورد استفاده قرار می گیرند. سیم پیچ های متحرک دارای کاربردهایی در حوزه فرکانس Audio می باشند، اما در فرکانس های بالا و در اعماق آب کاربرد چندانی ندارند.
- ترانسدیوس الکترو استاتیک
ترانسدیوس های مذکور متشکل از دو صفحه فلزی می باشند که فاصله موجود میان آن ها با استفاده از دی الکتریک پر شده است. گفتنی است که این ترانسدیوس ها در هوا عملکرد قابل توجهی را از خود به نمایش می گذارند.
- ترانسدیوسر ریلاکتاس متغیر
این دسته از هیدروفون ها کاربرد بسیار وسیعی در آب داشته و اساس عملکرد آن ها بر نیروی میان قطب های مغناطیسی استوار می باشد.